
新的輪轂電機驅動電動車電子差速控制系統研究
核心提示: 目前,一些新穎的電動汽車(EV)采用獨立的驅動方式,其代表是東京電力推出的IZA電動車其中集成的技術是一種直接驅動方法,每個輪裝的是輪轂電機,不再需要傳動機構和差速齒輪,可按所需動力來分配
核心提示: 目前,一些新穎的電動汽車(EV)采用獨立的驅動方式,其代表是東京電力推出的IZA電動車其中集成的技術是一種直接驅動方法,每個輪裝的是輪轂電機,不再需要傳動機構和差速齒輪,可按所需動力來分配兩電機的
目前,一些新穎的電動汽車(EV)采用獨立的驅動方式,其代表是東京電力推出的IZA電動車其中集成的技術是一種直接驅動方法,每個輪裝的是輪轂電機,不再需要傳動機構和差速齒輪,可按所需動力來分配兩電機的功率,因此整個系統的效率得以提高,同時,對于這種驅動單元,需要一個電子差速驅動控制系統。
現有的相關研究很少,其中大部分集中在帶有差速運行的特殊電機的設計上。本文通過對汽車差速現象的分析,提出了一種新的適用于中低速運行的輪轂電機驅動電動車電子差速方案,并設計實現了基于TMS320F2407DSP(兩個事件管理器模塊12路全比較PWM輸出能夠實現控制兩臺電機)的雙輪輪轂電機驅動控制系統,廣泛用于確定車輛的驅動策略(見寧波市科委青年基金資助項目可知,車輛純滾動時內外側輪的轉速比即為轉彎半徑比,這個模型只進行了靜態分析,沒有考慮輪胎的影響,忽略了車輛轉彎行駛時的離心力和向心力。按這個模型提出了電子差速方案,本文分析認為其不夠合理,從上述結構模型可知,在給定轉角的情況下,四個輪速和整車速度五個量的自由度為1,因此,如果同時對兩個驅動輪進行轉速控制,實際系統稍有誤差,將產生矛盾,導致被控各個車輪之間滑移率不同甚至會有滑轉出現,造成系統不穩定,影響整車的效率和最大功率輸出。
綜上所述,本文認為輪式驅動電動車電子差速不宜采用車輪速度作為控制變量。
2.2新的電子差速控制方案本文設計的電子差速方案,考慮轉彎時車輪的垂直載荷的變化,以使兩驅動輪的附著率相等為目標,并以此為依據分配兩輪的驅動轉矩,從而使得車輛發生滑轉的可能性減到最小。考慮風阻力和輪胎側向力的作用等多種因素,在給定總功率輸出下,本文對車輛的運動狀態進行了仿真,結果如所示,可見在轉速及轉角都較大時,轉矩分配比例變化較大,此時車體運動的離心力產生的側翻力矩起了決定性的作用。
車輛轉彎轉矩分配比仿真結果進一步簡化計算,只考慮離心力對垂直載荷的影響。由汽車動力學分析可知,對于靜止或筆轉彎時離心力產生的側向翻滾力矩為轉彎時驅動后車輪的載荷為N3二可以證明,對于<0.7的車體和<30的轉彎狀況,以r=估算,其誤差在5%以內。
故在此條件下,可得轉矩比為式(6),其仿真結果如所示,可以看出在中低速和轉角不過大的條件下,這種簡化的計算可以滿足工程要求。
簡化的車輛轉彎轉矩分配比仿真結果控制踏板輸入相當于轉矩控制指令,采用線性調節負反饋的電流控制,從的控制框圖得出輸出特性如式(7)所示,機械特性如所示,和內燃機汽車的踏板控制比較類似,有與傳統汽車類似的駕駛感覺。
轉矩控制框圖本文所設計的基于DSP2407的電子差速控制系統總體框圖如所示。功率電路采用半橋調制方式,可以降低逆變器的開關損耗,三相Y聯接的無刷直流方波輪轂電機采用兩兩導通方式,即每一瞬間有兩個功率管導通,每隔60°電角度換相一次,每個功率管導通120°電角度。DSP選用美國德州儀器公司的電機微控制器TMS320X2407,其采用高性能靜態CMOS技術,使得供電電壓降到3.3V,減小了控制器的功耗,兩個事件管理器模塊12路全比較PWM輸出能夠實現控制兩臺電機,由于DSP片內的資源豐富,如具有AD轉換等功能模塊,使控制電路大為簡化。限于篇幅,本文著重介紹設計中幾個方面。
3.2新的半橋調制時相電流檢測方法針對本系統采用兩相導通三相六拍運行方式,PWM調制采用半橋調制方式,在PWM無效期間直流端電流為0,所以在PWM有效期間進行電流信號采樣,才可以有效地檢測到電機的相電流,本文通過軟件設計的改進,簡單準確地實現了單電流傳感器檢測相電流。為AD轉換的時序示意圖,簡要說明如下:電流傳感器放在直流端,通過設定DSP控制字ACTRA/B使PWM信號高電平有效,DSP的通用定時器T1設定為連續加減控制系統總體框圖PWM周期=連續加減計數模式MOSFET上的PWM信號相電流示意圖直流端;電流"示意圖DSP2407的控制器是3.3V,但其和5V的接口電路不可避免,現有的3.35V的轉換芯片價記數方式每51期中斷為個電流采publi的方法,檢測到的電流值與實際的電流平均值更為接近。另外,由于DSP2407的特點,為了降低ADC轉換的時間,電流傳感器的輸出信號經過常規的濾波放大后再加一級射極跟隨器電路,這樣信號端的輸出電阻很小,同時,通過改變ADCTR1的寄存器中的ACQPS3ACQPS0位段域和CPS位來實現調整2407器件ADC的采樣和保持模塊來適應信號阻抗的變化,這樣可以在保證采樣精度的同時盡可能選取轉換時間短的設定,以適應PWM脈寬小的情況。
DSP的輸入腳有時有內部的上拉或下拉電路,這樣,它不影響接口電路的阻抗計算,但是影響DC偏置計算做。給出了幾個接口方法,為簡化分析,不考慮內部的上拉或下拉。
3V的接口電路當TTL器件最大供電電壓是5.25V,在額定電流時TTL輸出的高電壓是3.4V,空載時是4.05V;因此如考慮元件之間的最大壓差,假定DSP供電電壓是3.0V最大容許電壓是3.3V,邏輯高電平的最大壓差是0.75V.如果電流限在75M,在DSP與TTL之間加一10k的電阻足夠了,這產生了小的RC延時(10knx5pF=5Qns),除了CAN總線,這種延時可以忽略,也可用更大電阻降低電流,但延時變長噪音抑制能力變差。
當供電電源是5.25V時,5VCMOS輸出空載時是5.25V,所以邏輯高電平時壓差是1.95V,因此要加分壓電路,如果電阻減小輸入電阻也小。
因為DSP的輸出是TTL兼容,不需要特別的電路,TTL的高低邏輯是2.4V到0.8V,而3.3V CMOS的輸出高低邏輯是2.8V到0.4V,這中間有很大的域度,許多電機控制芯片是5V供電TTL輸出到5VCMOS輸入:這之間需要電平平移,當R1是10k時,CMOS輸出是0.2V到3.3V,經D1的平移,輸出是0.8V到3.9V,5VCMOS輸入的門檻電壓是1V到3.5V,中間還有0.2到0.4的域度。同時,有小的延時存在。
3.4改進的轉子位置檢測方法本系統的永磁無刷輪轂電機帶有霍爾傳感器,使用方便且價格低廉。但是,對于功率較大的電機,當繞組電流較大時,一方面將影響永磁轉子所產生的磁場使其空間位置偏移,一方面由于換相電流沖擊影響位置傳感器附近的磁場分布,這兩種情況都使得霍爾位置傳感器的信號產生誤差,甚至因干擾不能正常工作。通常此類電機的控制方案是把三路位置傳感器輸出接DSP器件的捕獲單元,本系統中兩個電機的六路位置傳感器信號如使用捕獲單元就需要涉及4個定時器及相應中斷的使用。本系統摒棄這種常規方法,將位置傳感器輸出接DSP的/O口,在產生PWM的定時器下溢中斷服務程序中讀I/O口的狀態,判斷兩電機相應的位置信號,并與前次位置信號對比,采取弱延遲換相和換相鎖定技術,即在檢測到位置改變時并非立即換相,而是繼續在微小間隔內進行若干次位置檢測,進一步判定是否確實處于換相的位置,當確定換相操作后,在一微小間隔內無論轉子位置信號有無變化,都不再進行換相。這樣既保證了換相處理的準確性,相對于使用捕獲單元,軟件設計也簡化。設計中PWM的開關頻率為15kHz,電機額定轉速是340r/min,所以定時器下溢中斷間隔相對于電機最小換相時間間隔足夠小。
主程序部分完成系統初始化,兩電機電流AD采樣結果的處理,兩驅動輪輪速計算,車體速度估算,電子差速算法及實施。
T1定時器下溢中斷服務程序中完成從I/O口分別讀取兩個電機位置信號,并完成上述的弱延遲換相和換相鎖定,設定兩個電機的ACTRA/B控制字,啟動車體轉角的AD采樣等。
T1定時器周期中斷十次啟動相應的兩個電機的電流AD米樣等。
集成模塊IR2130.兩個電機的電流、過電壓、欠電壓等保護信號產生時先硬件封鎖其對應的IR2130的輸出,同時接對應的DSP的PDPINTA或PD-PINTB腳。在DSP的相關書中,對PDPINT電源中斷未有具體使用說明,本文根據實際試驗,總結了TI2407DSP的PDPINTA/B電源中斷的特點,說明如下:PDPINTA或PDPINTB管腳信號為下降沿有效,相應的PWM輸出變為高阻狀態,這種高阻狀態在程序復位后才可以解除,同時,此管腳信號的下降沿同時產生中斷申請,如果相應的中斷未被屏蔽,則進入中斷服務程序,完成相應的故障發生后的后臺處理,中斷服務程序完成后程序繼續運行,但對ACTRA/B的改動不會影響其輸出。本設計在電源中斷服務程序中進行故障分析并給出故障指示,如果故障沒有解除則此循環檢測,故障解除后程序跳轉到0000H復位。
實驗結果(b)是直線運行時兩電機的電流,由于從電流波形的頻率可以換算到電機的轉速,可以看出此時兩電機的轉矩和轉速基本相同,(c)是轉角為5°時兩電機的電流,此時外側電機的轉矩大于內側電機的轉矩,同時轉速高于內側電機的轉速,實現了良好的電子差速控制。

責任編輯:電小二
免責聲明:本文僅代表作者個人觀點,與本站無關。其原創性以及文中陳述文字和內容未經本站證實,對本文以及其中全部或者部分內容、文字的真實性、完整性、及時性本站不作任何保證或承諾,請讀者僅作參考,并請自行核實相關內容。
我要收藏
個贊
-

現貨模式下谷電用戶價值再評估
2020-10-10電力現貨市場,電力交易,電力用戶 -

PPT | 高校綜合能源服務有哪些解決方案?
2020-10-09綜合能源服務,清潔供熱,多能互補 -

深度文章 | “十三五”以來電力消費增長原因分析及中長期展望
2020-09-27電力需求,用電量,全社會用電量
-
PPT | 高校綜合能源服務有哪些解決方案?
2020-10-09綜合能源服務,清潔供熱,多能互補 -
深度文章 | “十三五”以來電力消費增長原因分析及中長期展望
2020-09-27電力需求,用電量,全社會用電量 -
我國電力改革涉及的電價問題



-

貴州職稱論文發表選擇泛亞,論文發表有保障
2019-02-20貴州職稱論文發表 -

《電力設備管理》雜志首屆全國電力工業 特約專家征文
2019-01-05電力設備管理雜志 -

國內首座蜂窩型集束煤倉管理創新與實踐
-
人力資源和社會保障部:電線電纜制造工國家職業技能標準
-
人力資源和社會保障部:變壓器互感器制造工國家職業技能標準
-

《低壓微電網并網一體化裝置技術規范》T/CEC 150
2019-01-02低壓微電網技術規范
-
現貨模式下谷電用戶價值再評估
2020-10-10電力現貨市場,電力交易,電力用戶 -

建議收藏 | 中國電價全景圖
2020-09-16電價,全景圖,電力 -

一張圖讀懂我國銷售電價附加
2020-03-05銷售電價附加
-
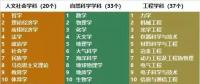
電氣工程學科排行榜發布!華北電力大學排名第二
-
國家電網61家單位招聘畢業生
2019-03-12國家電網招聘畢業生 -

《電力設備管理》雜志讀者俱樂部會員招募
2018-10-16電力設備管理雜志
