
帶神經網絡觀測器的永磁同步電機極點配置自校正前饋控制
核心提示: 永磁同步電機( PMSM )具有氣隙磁密高、轉矩脈動小、轉矩 慣量比大、效率高等優點,在中小容量的伺服系統中得到了廣泛應用 永磁同步電機( PMSM )具有氣隙磁密高、轉矩脈動小、轉矩 慣量
核心提示: 永磁同步電機( PMSM )具有氣隙磁密高、轉矩脈動小、轉矩/慣量比大、效率高等優點,在中小容量的伺服系統中得到了廣泛應用
永磁同步電機( PMSM )具有氣隙磁密高、轉矩脈動小、轉矩/慣量比大、效率高等優點,在中小容量的伺服系統中得到了廣泛應用。由于伺服系統運行情況比較復雜, PMSM本身又是一個多變量、非線性、強耦合的系統,因此一般控制器都采用PI控制器,容易受電機參數變化和負載擾動等不確定性的影響,而且動態響應和抗擾能力不能很好地兼顧。為了克服PI控制器的不足,多種消除不確定性影響的控制策略已相繼提出[ 1~5].然而,這些策略基本上是按著線性設計模型得到的。實際上電磁轉矩中不可避免地包含有紋波轉矩和齒槽轉矩等脈動轉矩,加之負載轉矩的不確定性,轉矩中存在大量的非線性和不確定性,有時會引起控制品質嚴重下降,因而魯綏化人,教授,博士生導師,從事智能控制、多變量控制及其在交流傳動中的應用等研究。
棒性得不到保證。本文把脈動轉矩和負載轉矩合視為可測干擾,提出一種基于神經網絡的永磁同步電機的極點配置自校正前饋控制( PPST FC)策略。
極點配置自校正前饋控制將前饋和反饋結合起來實現了對系統的自適應極點配置,但它本身根本無法解決干擾的測量問題。神經網絡作為一種新的手段在系統辨識和控制中已有廣泛應用,且已應用于交流傳動領域[ 6, 7].本文利用一種遞歸神經網絡作為負載轉矩觀測器,以文獻[ 8]中所提出的方法對遞歸神經網絡進行了快速訓練。
2矢量控制的PMSM永磁同步電機的數學模型為式中, u和u分別為d和q軸定子電壓, i和i分別為d和q軸定子電流,和分別為d和q軸定子磁和L分別為定子繞組的d和q軸電感, R為定子電阻,為電角速度, p為微分符號, L為定、轉子間的d軸互感, I為永磁體的等效d軸勵磁電流,P為極對數, T為電磁轉矩, T為負載轉矩, J為轉動慣量, B為阻尼系數,為轉子角速度。
永磁同步電機控制的基本原理是矢量控制,如果i = 0, d軸定子磁鏈不變,而永磁同步電機中和I為常數,所以電磁轉矩T與i成比例,即把式( 8)代入式( 7)可得頻域模型加入零階保持器,對式( 9)進行z變換,得離散化方程為其中3帶神經網絡綜合負載轉矩觀測器的PMSM極點配置自校正前饋控制3. 1極點配置自校正前饋控制器將式( 10)表示為( k)為輸入,控制系統的結構如圖1所示,借鑒常規極點配置的設計方法[ 9],可設控制器方程為將式( 12)中的u( k)代入式( 11) ,得到給定穩定的期望閉環極點多項式T ( z) ,得到極點配置方程)互質,式( 14)有唯一解。
對多項式D ( z)的選擇方法與常規線性對象設計時一樣。為了有效地消除靜差,在控制器中加入積分器,于是D( z)滿足由于PM SM參數和負載擾動的變化,對象模型控制與決策的參數會發生變化,采用顯式算法先辨識過程模型參數,再求控制律。應用具有遺忘因子的遞推最小二乘算法估計參數式中3. 2神經網絡綜合負載轉矩觀測器PM SM的電磁轉矩中實際上還包含有由反電勢或定子電流諧波引起的紋波轉矩以及由定子鐵心與轉子磁場相互作用(亦稱齒槽效應)引起的齒槽轉矩。其中紋波轉矩與定子電流和轉子位置有關,齒槽轉矩與轉子位置有關,且其中的關系非常復雜,難以精確表示。另外,負載轉矩本身存在大量的非線性和不確定性。所以PM SM簡化模型中的T準確計算。為此,根據實際中主要負載轉矩基本可知的情況,對實際系統可已知的負載轉矩直接引入,設為T( k) 而對于不確定的部分加上電磁轉矩中的紋波轉矩和齒槽轉矩等脈動轉矩,采用一遞歸神經網絡來訓練得到,設為f( k)。因為遞歸神經網絡能夠直接辨識黑箱系統(參見圖1) ,有綜合負載轉矩為這里采用文獻[ 9]中所用的對角遞歸神經網絡及快速訓練算法。
帶神經網絡綜合負載轉矩觀測器的PM SM極點配置自校正前饋控制的步驟如下:1)確定期望的極點多項式T ( z 2)測取對象的輸出y( k) ,確定T( k) ,利用神經網絡求f 3)對式( 17)進行模型辨識4)對神經網絡進行在線辨識4實驗仿真采用美國科爾摩根公司的PM SM矢量控制系統進行實驗, PM SM參數。用一臺直流電機提供確定的負載轉矩。在永磁同步電機上安裝變慣量機械裝置,通過其上安放不同的鐵盤來改變轉子的轉動慣量和阻尼系數。
實驗中速度給定為700 r min 1,開始外部負載轉矩T = 0,在1 s時加入3 N m的負載轉矩。對3種情況進行實驗: 1)額定情況 2)增大J約5倍, B不變 3)增大B約5倍, J不變。為比較效果,應用傳統的PI速度控制器也進行了實驗。由遞歸神經網絡構成的綜合負載轉矩觀測器先針對額定空載情況進行了離線訓練。取在線訓練步數為5,遺忘因子= 0. 99.圖2為PI控制的結果,圖3( a)和( b)分別為把所加負載轉矩作為T( k)的控制結果,通過對比可看出所提出控制策略的有效性。
測器的PPSTFC的響應結果( a)把所加負載轉矩視為f( k)的結果( b)把所加負載轉矩視為T( k)的結果李鴻儒等:帶神經網絡觀測器的永磁同步電機極點配置自校正前饋控制5結語本文提出一種帶神經網絡綜合負載轉矩觀測器的永磁同步電機極點配置自校正前饋控制策略。由遞歸神經網絡構成綜合負載轉矩觀測器,從而把綜合負載轉矩視為可測干擾,實現了永磁同步電機極點配置自校正前饋控制,對參數變化和負載擾動等不確定性進行了有效的前饋補償。理論分析和實驗仿真證明所提出的控制策略具有較強的魯棒性,明顯優于傳統的控制策略。
盡管采用了快速的訓練方法,限于方法的局限以及微機的計算速度,遞歸神經網絡構成的綜合負載轉矩觀測器的在線訓練無法達到最優。文中把已知的負載轉矩直接引入,而對于不確定的部分采用遞歸神經網絡來訓練得到的方法非常實用有效,實驗仿真結果充分說明了負載轉矩的直接引入控制效果最佳。

責任編輯:電小二
免責聲明:本文僅代表作者個人觀點,與本站無關。其原創性以及文中陳述文字和內容未經本站證實,對本文以及其中全部或者部分內容、文字的真實性、完整性、及時性本站不作任何保證或承諾,請讀者僅作參考,并請自行核實相關內容。
我要收藏
個贊
-

現貨模式下谷電用戶價值再評估
2020-10-10電力現貨市場,電力交易,電力用戶 -

PPT | 高校綜合能源服務有哪些解決方案?
2020-10-09綜合能源服務,清潔供熱,多能互補 -

深度文章 | “十三五”以來電力消費增長原因分析及中長期展望
2020-09-27電力需求,用電量,全社會用電量
-
PPT | 高校綜合能源服務有哪些解決方案?
2020-10-09綜合能源服務,清潔供熱,多能互補 -
深度文章 | “十三五”以來電力消費增長原因分析及中長期展望
2020-09-27電力需求,用電量,全社會用電量 -
我國電力改革涉及的電價問題



-

貴州職稱論文發表選擇泛亞,論文發表有保障
2019-02-20貴州職稱論文發表 -

《電力設備管理》雜志首屆全國電力工業 特約專家征文
2019-01-05電力設備管理雜志 -

國內首座蜂窩型集束煤倉管理創新與實踐
-
人力資源和社會保障部:電線電纜制造工國家職業技能標準
-
人力資源和社會保障部:變壓器互感器制造工國家職業技能標準
-

《低壓微電網并網一體化裝置技術規范》T/CEC 150
2019-01-02低壓微電網技術規范
-
現貨模式下谷電用戶價值再評估
2020-10-10電力現貨市場,電力交易,電力用戶 -

建議收藏 | 中國電價全景圖
2020-09-16電價,全景圖,電力 -

一張圖讀懂我國銷售電價附加
2020-03-05銷售電價附加
-
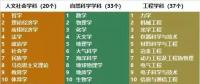
電氣工程學科排行榜發布!華北電力大學排名第二
-
國家電網61家單位招聘畢業生
2019-03-12國家電網招聘畢業生 -

《電力設備管理》雜志讀者俱樂部會員招募
2018-10-16電力設備管理雜志
