
基于Gene8310的嵌入式家庭服務機器人
摘要:為了實現智能家庭服務機器人的人臉跟蹤、語音識別、自主移動、動作響應、遠程遙控等功能,采用了基于Gene8310的嵌入式設備系統,對家庭服務機器人進行整體設計,在硬件上外擴相應的通訊、傳感、驅動等系統,在軟件上引入人臉跟蹤,語音識別技術,實現了機器人與人的和諧交互。實踐證明該系統具有較好的實時性和魯棒性。
關鍵詞:Gene8310家庭服務機器人嵌入式系統
1引言
家庭服務機器人是機器人的發展方向,是我國進一步加強機器人技術研究的突破口。家庭服務機器人旨在將家庭成員從家居的繁瑣家務中解放出來,給家庭成員提供幫助、娛樂等。
本文介紹的家庭服務機器人如圖1所示。機器人身高140cm,行走驅動方式采取輪式差動驅動。胳膊是模擬肩關節、肘關節的三自由度結構,采用伺服電機作為關節執行機構。機器人上面安裝了攝像頭、麥克風接口、觸摸液晶屏、超聲波
圖1家庭服務機器人實物圖
傳感器。可以與家庭成員完成人機交互,回答家庭成員的提問問題。
本文設計的家庭服務機器人是基于Gene8310的嵌入式設備,在此基礎上實現了自主移動、動作表演、人臉跟蹤、語音交互、遠程遙控等功能,測試表明,本系統具有良好的穩定性、使用性和可操作性,可以實現家庭服務機器人的各項工作要求。
Gene8310是Intel推出的一款嵌入式設備,具有體積小巧,工作穩定,可擴展性強等特性,支持單5V供電工作。
Gene8310嵌入式主板尺寸長146mm寬101.6mm,內置IntelCeleron處理器主頻600MHz,最大可支持1GB的SODIMM內存插槽,配有CF卡插槽,硬盤接口,PS2接口、4個USB2.0接口,2個RS232接口,音頻輸入輸出接口,可接CRT/LCD顯示器。
2系統設計
2.1整體系統設計
本文系統設計如圖2所示。
圖2機器人控制系統設計框圖
針對家庭服務機器人的任務要求,將機器人控制系統分成以下模塊:嵌入式系統、攝像頭、揚聲器、麥克風、人臉跟蹤系統、語音識別系統、無線通訊系統等。嵌入式系統采用Gene8310微型主板作為硬件平臺,運行Windows操作系統;人臉跟蹤系統、語音識別系統是運行在Windows操作系統下面的基于VC的程序;無線通訊系統是基于Q2501B的GPRS通訊模塊;動作控制是基于PIC16F877A的7自由度伺服電機的控制;行走控制是雙行走輪差動控制的驅動方式。
2.2動作控制系統設計
家庭服務機器人的動作主要是讓機器人模擬人的手臂關節,以便機器人實現人的一些動作,本論文設計的機器人手臂有三個自由度,分別模擬人體的肩關節、肘關節,可以實現抬臂、彎臂、擺臂等動作,一個手臂三個自由度的組合,可以實現握手、揮手、招手等動作,兩個手臂的組合又可以實現鼓掌、擁抱等人的基本動作。
2.3行走控制系統設計
家庭服務機器人行走控制系統采用的是雙行走輪差動控制的驅動方式,機器人的模型如圖3所示。這里我們假定機器人和地面之間是純滾動的,行走輪只旋轉不打滑,得到運動學模型公式
式中:(x,y)為機器人中心O點的參考坐標;θ為機器人中心O點的運動方向角;ν為機器人中心O點的速度;ω為機器人差動轉向的角速度。
根據上述數學模型,結合機器人的結構特點,把機器人的運動簡化為與地面接觸的兩點運動,兩點的位置決定了機器人的位置,兩點的運動狀態決定了機器人的運動狀態。圖3中XOY為全局坐標系,xoy為機器人坐標系,O為速度瞬心。
圖3家庭服務機器人行走控制
在此,把前進的方向作為正方向,把后退的方向作為負方向,統一起來分析,設在某一時刻,左、右行走輪的速度為vL、vR,左、右行走輪角速度為ωL、ωR,在很短的時間間隔Δt內,機器人的方向和線速度可以近似認為不改變。兩行走輪與地面接觸點之間的距離(即機器人兩行走輪的跨距)為l。
在行走過程中,主控制系統把規劃好的路徑轉變成隨時間變化的兩個獨立驅動輪的角速度的控制,通過驅動器和電動機,分別去驅動兩個驅動輪,兩個驅動輪的角速度都要根據規劃路徑的變化而變化。當家庭成員發出指令讓機器人去指定地點的時候,機器人根據事先規劃好的路徑自主到達指定的目的地。
3無線通訊
家庭服務機器人的無線通訊指的是人與機器人的遠程通訊,最好利用現有的家庭成員的物件稍加改進皆可以實現對服務機器人的操作。本設計基于當前比較普及的手機短信來實現對機器人的遠程通訊,在機器人控制系統上加一個手機模塊,然后通過家庭成員的手機發短信來控制機器人。
本設計采用的GPRS模塊為wavecom公司的Q2501B,可以快速、安全、可靠的實現數據通信、語音傳輸、短消息服務,擁有OpenAT指令接口,支持文本和PDU模式的短消息,可以方便的通過串口發送AT指令來操作,值得一提的是,Q2501B模塊內部還集成了一個GPS模塊,定位精度3m。可以方便的將機器人的位置信息通過短消息傳送給終端。
機器人的遠程遙控主要是通過手機短信的方式實現的,在外的家庭成員通過自己的手機給智能家庭服務機器人發送控制指令,機器人收到控制指令執行相應的動作,如圖4所示。
圖4無線通訊模塊系統框圖
4人機交互
家庭服務機器人的人機交互包括家庭成員對機器人的命令以及機器人對家庭成員的反饋。本設計中的是實現人與機器人的語音交互。
4.1人臉檢測
本設計采用人臉膚色模型結合相似度以及人臉輪廓來檢測和定位人臉。在YCbCr色彩空間(其中Y表示亮度,Cb表示飽和度,Cr表示色調)中Y值不同的地方,CbCr子平面中膚色聚類區域是不同的,膚色聚類區域隨Y變化而呈現出非線性變化。考慮Y值的影響,對YCbCr色彩格式進行非線性分段色彩變換,再將變換后的圖形投影到Cb-Cr二維子空間就可以得到實用的人臉膚色聚類模型。根據該模型,可采用基于相似度的方法來檢測人臉。為了消除亮度對人臉膚色的影響,定義r=R/(R+G+B),b=B/(R+G+B),把三維基色空間降解成二維的半基色空間,然后用基于頻域的同態濾波法對圖像進行光照補償處理。這樣就能大大地提高人臉檢測的準確率。
4.2語音識別
本設計采用的語音識別引擎是基于漢語語義識別的語音識別系統,其對于漢字的識別有2000個漢字,可以滿足家居生活對話的基本需求,當前機器人與人的對話可以實現生活常識、旅游常識、腦筋急轉彎、背詩、聊天等功能,給家庭成員提供娛樂、教育、幫助等功能。
4.3運動響應
機器人對人的運動響應主要指得是機器人對人發出的運動指令的相應,在本設計當中,機器人可以相應的運動指令有:前進、后退、左傳、右轉、搖頭、請、招手、擺手、擺臂、揮手、鼓掌、握手、擁抱、再見等。機器人動作相應的過程如下圖所示。
圖5服務機器人運動響應
家庭成員通過麥克風向服務機器人發運動要求,語音識別引擎啟動,將識別出來的語義與數據庫匹配,取得動作指令碼,然后將動作指令碼通過串口發送到控制模塊,機器人執行機構執行相應的動作。
5結束語
本文設計了基于Gene8310微型主板的智能家庭服務機器人系統,本智能家庭服務機器人實現了人臉跟蹤、語音識別、自主移動、動作響應、遠程遙控等功能。其中自主移動采用的是雙行走輪差動控制的驅動方式,很好的滿足了室內全方位移動的特性;遠程遙控采用的是基于Q2501B的GPRS網絡,成本低,無距離限制,受環境影響較小,可以充分利用無線共網的其他優點,由于受到現有無線通信公網帶寬的限制,其視頻傳輸的特點較弱,隨著3G技術的發展,高帶寬將豐富機器人遠程遙控的多媒體交互信息,家庭成員可以遠程視頻家居內部的情況;人臉跟蹤是基于膚色模型和人臉輪廓理論實現人臉識別跟蹤,模型有較好的實時性和魯棒性;語音識別采用的是基于模式識別的語音識別引擎,在特定數據庫里面可以達到很好的識別效果,下一步研究將機器學習技術加進來,可以讓機器人在特定家居環境下完成技能學習。經測試,機器人可以完成預定家庭服務機器人的各項基本功能。
參考文獻
1金欣.基于無線通信公網的移動機器人遠程監控系統[J].制造業自動化,2006(8):53-58
2陳凱楓.家庭服務機器人的人臉檢測、跟蹤與識別研究[J].微計算機信息,2006,5-2:228-230

責任編輯:電力交易小郭
-

現貨模式下谷電用戶價值再評估
2020-10-10電力現貨市場,電力交易,電力用戶 -

PPT | 高校綜合能源服務有哪些解決方案?
2020-10-09綜合能源服務,清潔供熱,多能互補 -

深度文章 | “十三五”以來電力消費增長原因分析及中長期展望
2020-09-27電力需求,用電量,全社會用電量
-
PPT | 高校綜合能源服務有哪些解決方案?
2020-10-09綜合能源服務,清潔供熱,多能互補 -
深度文章 | “十三五”以來電力消費增長原因分析及中長期展望
2020-09-27電力需求,用電量,全社會用電量 -
我國電力改革涉及的電價問題



-

貴州職稱論文發表選擇泛亞,論文發表有保障
2019-02-20貴州職稱論文發表 -

《電力設備管理》雜志首屆全國電力工業 特約專家征文
2019-01-05電力設備管理雜志 -

國內首座蜂窩型集束煤倉管理創新與實踐
-
人力資源和社會保障部:電線電纜制造工國家職業技能標準
-
人力資源和社會保障部:變壓器互感器制造工國家職業技能標準
-

《低壓微電網并網一體化裝置技術規范》T/CEC 150
2019-01-02低壓微電網技術規范
-
現貨模式下谷電用戶價值再評估
2020-10-10電力現貨市場,電力交易,電力用戶 -

建議收藏 | 中國電價全景圖
2020-09-16電價,全景圖,電力 -

一張圖讀懂我國銷售電價附加
2020-03-05銷售電價附加
-
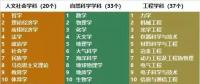
電氣工程學科排行榜發布!華北電力大學排名第二
-
國家電網61家單位招聘畢業生
2019-03-12國家電網招聘畢業生 -

《電力設備管理》雜志讀者俱樂部會員招募
2018-10-16電力設備管理雜志
